03 Stablity&Response&Modeling
稳定性 Stability
系统稳定性是我们对一个系统关心的指标之一,一个稳定的系统能够保证系统的可用性,可靠性,安全性。
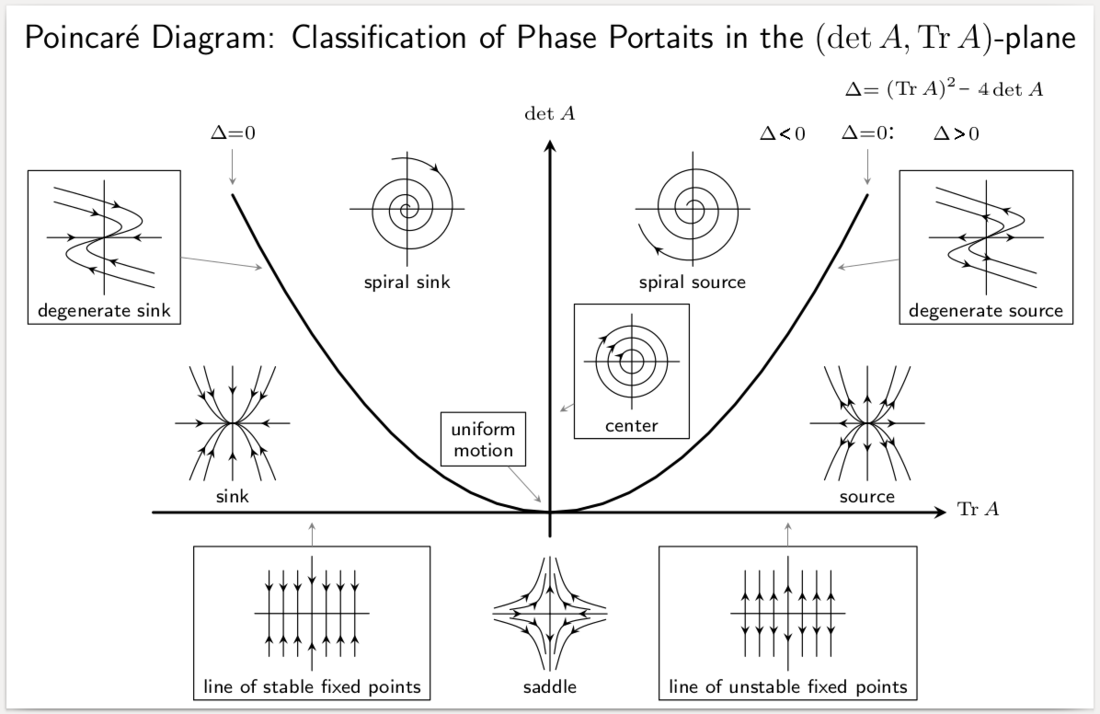
一般来说,我们通过传递函数的极点来判断系统的稳定性。当传递函数的极点在左半平面时,系统是稳定的。当传递函数的极点在右半平面时,系统是不稳定的。当传递函数的极点在虚轴上时,系统是临界稳定的。但是对于高阶系统,求出极点并不是一件容易的事情,我们可以使用一些方法来判断系统稳定性
Rous 判据
劳斯判据实际上是一种辗转相除法。一般来说我们使用一个 Rous Table 来记录辗转相除的过程并最终统计出系统的稳定性。
\[
\begin{array}{|l|l|l|l|}
\hline a_n & a_{n-2} & a_{n-4} & \ldots \\
\hline a_{n-1} & a_{n-3} & a_{n-5} & \ldots \\
\hline b_1 & b_2 & b_3 & \ldots \\
\hline c_1 & c_2 & c_3 & \ldots \\
\hline \vdots & \vdots & \vdots & \ddots \\
\hline
\end{array}
\]
其中
\[
\begin{aligned}
b_i & =\frac{a_{n-1} \times a_{n-2 i}-a_n \times a_{n-2 i-1}}{a_{n-1}} \\
c_i & =\frac{b_1 \times a_{n-2 i-1}-a_{n-1} \times b_{i+1}}{b_1}
\end{aligned}
\]
第一列中的符号变化次数将是非负极点的数目。
当出现第一项为 0 时,通常表示包含在 y 轴上的极点。
典型的一阶和二阶系统
一阶系统
一阶系统具有传递函数:
\[G(s) = \frac{K}{\tau s+1}\]
对于一个阶跃输入 \(u(t) = 1(t),(t>0)\),系统的输出为:
\[
y(t) = \mathcal{L}^{-1}\left(\frac{K}{\tau s+1}\frac{1}{s}\right) = K - K\mathrm{e}^{-\frac{t}{\tau}}
\]
绘图如下:
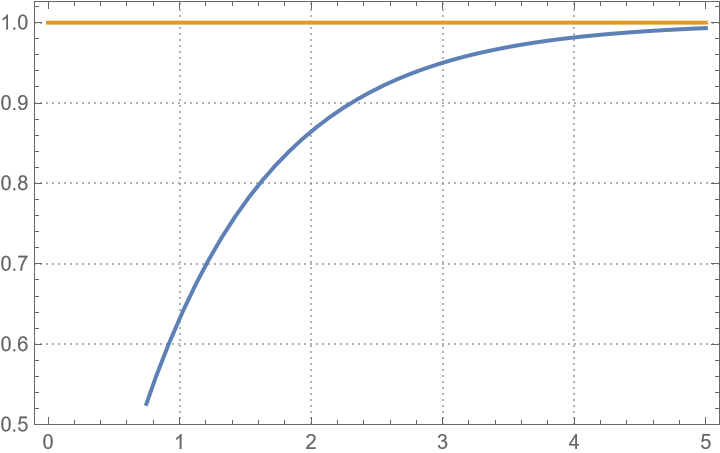
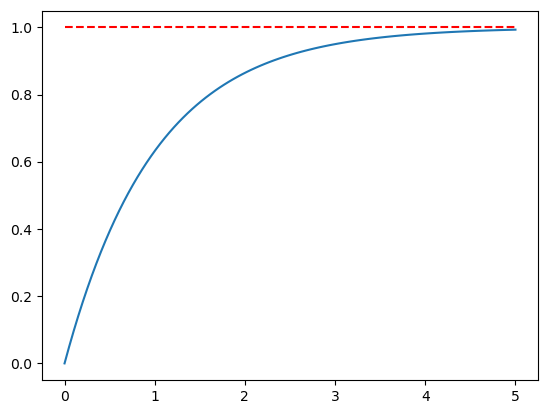
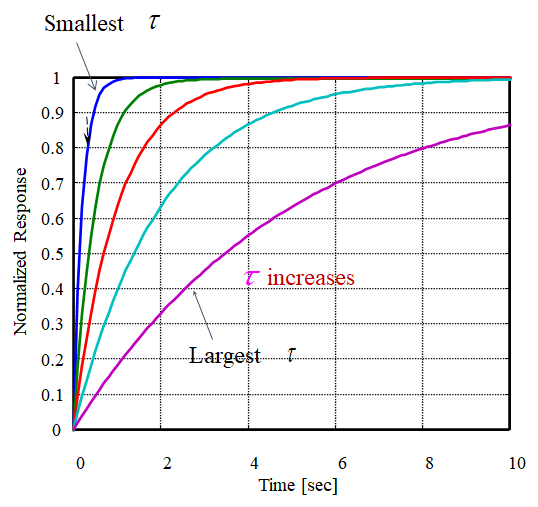
一阶系统通常使用阶跃响应的时间常数 \(\tau\) 来描述系统的动态响应速度。时间常数越小,系统的动态响应越快。
一般来说,一阶系统可以在 \(t = 4\tau\) 时达到距离目标 2% 以内,在 \(t = 5\tau\) 时达到距离目标 0.7% 以内。
二阶系统
二阶系统具有传递函数:
\[
G(s) = \frac{K}{\frac{1}{\omega_n^{2}} s^2 + \frac{2\zeta}{\omega_n} s + 1}
\]
其极点为:
\[
p_{1,2} = -\zeta \omega_n \pm \omega_n\sqrt{\zeta^2 - 1}
\]
特别的,当 \(\zeta<1\) 时,将会有两个共轭的复数极点,此时 \(p_{1,2}=-\zeta \omega_n \pm \mathrm{j}\omega_n\sqrt{1-\zeta ^{2}}\) , 令 \(\sigma = \zeta \omega_n\), \(\omega_d = \omega_n\sqrt{1-\zeta ^{2}}\)
对于一个阶跃输入 \(u(t) = 1(t),(t>0)\),系统的输出为:
\[
y(t) = \mathcal{L}^{-1}\left(\frac{K}{\frac{1}{\omega_n^{2}} s^2 + \frac{2\zeta}{\omega_n} s + 1}\frac{1}{s}\right) = K - \frac{K}{\sqrt{1-\zeta ^{2}}}\mathrm{e}^{-\sigma t}\sin \left(\omega_d t+\arctan \frac{\sqrt{1-\zeta ^{2}}}{\zeta}\right)
\]
我们感兴趣的量有以下几个:
- 峰值时间 \(t_p\):系统输出第一次到达峰值的时间。 \(t_p=\frac{\pi}{\omega_d}=\frac{\pi}{\omega_n\sqrt{1-\zeta ^{2}}}\)
- 超调量 \(\%OS = K\mathrm{e}^{-\frac{\pi \zeta}{\sqrt{1-z^{2}}}}\)
- settling time \(t_s\) 大概也是取 \(t_s = 4\tau\)
绘图如下:
import numpy as np
import matplotlib.pyplot as plt
K = 1
ζ = 0.5
ωn = 1
σ = ζ * ωn
ωd = ωn * np.sqrt(1 - ζ ** 2)
t = np.linspace(0, 5, 100)
y = K - K / np.sqrt(1 - ζ ** 2) * np.exp(-σ * t) * np.sin(ωd * t + np.arctan(np.sqrt(1 - ζ ** 2) / ζ))
plt.plot(t, y)
plt.plot(t, K * np.ones_like(t), 'r--')
plt.show()